TL;DR
大名鼎鼎的 Masstree。
Introduction
开篇第一句话很酷:“Storage server performance matters”。无论什么系统,单机性能永远是非常关键的。毕竟最好的分布式系统就是不要分布(笑)。
面向多核设计的一些关键因素:
- 通常读远多于写,因此优化读的性能要比优化写更关键。
- 锁不是万恶之源,争抢才是。纯粹的 lockfree 可能难以实现,实现了性能代价也可能很高。在需要原子更新/读取多值时,细粒度锁往往优于 lockfree。
- 从 memory-model 角度理解并发操作,避免使用过强的 coherence(如 serializable)。锁本身意味着 serializable,但如果 acquire/release 就能满足要求,那锁就是过强的。
- “不要共享”和“immutable”都是提升性能的利器。这往往意味着 copy-on-write 要出场了。lockfree 也经常需要结合 copy-on-write 才能实现。但此时需要仔细设计如何处理写写冲突。
- memory stall 已经成为了现代系统的一大性能瓶颈,充分利用 cache 以及 prefetch 是关键。前者意味着良好的数据结构设计,避免跨 cacheline 的原子操作,避免 false-sharing,利用空间局部性;后者则是在主动利用时间局部性。
Masstree 其实也是一个 LSM-like 系统,亮点是它的 in-memory 结构。
TODO
System interface
Masstree 有一套典型的 key-value 接口:
- get(k)
- put(k, v)
- remove(k)
- getrange(k, n)
其中前三个是原子的,getrange 不是。
Masstree
Masstree 的特点:
- 多核之间共享(区别于不同核访问不同的树)。
- 并发结构。
- 结合了 B+tree 和 Trie-tree。
Masstree 直面的三个挑战:
- 能高效支持多种 key 的分布,包括变长的二进制的 key,且之间可能有大量相同前缀。
- 为了保证高性能和扩展性,Masstree 必须支持细粒度并发,且读操作不能读到被写脏的共享数据。
- Masstree 的布局必须能支持 prefetch 和按 cacheline 对齐。
后两点被作者称为“cache craftiness”。
Overview
Masstree 的大结构是一棵 trie tree。
ART 中提到 trie tree 相比其它 tree 结构的优点是:
- 天然的前缀压缩,不需要在叶子节点保存每个完整的 key,节省空间。
- 固定 fanout 的 trie tree 能节省 key 之间的比较开销。另外它按下标寻址的特点也天然适合实现 lockfree。
Masstree 选择用 trie tree 的理由大体也是这样。但 trie tree 的一个问题是 fanout 很难确定:
- fanout 太小,树的深度太大,查询经历的节点太多,随机访问次数多,性能不高。
- fanout 太大,空间浪费严重。
ART 的思路是设计多种 node 大小,加上前缀压缩和 lazy expansion 来降低空间浪费。
Masstree 则使用了另一种思路:选择一个巨大的 fanout(2^64,8 字节),但使用 B+tree 来实现 trie node。这样混搭方案的优点:
- 逻辑上仍然是 trie tree,前缀压缩的优点仍然在。
- fanout 足够大,避免树太高。
- 物理上使用 B+tree,有效避免空间浪费。
- 此时 B+tree 面对的只是单个 trie node 的短 key(不超过 8 字节),可以将 key compare 实现得非常高效。
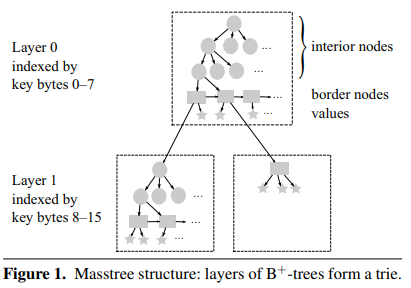
可以看到 Masstree 逻辑上分成了若干层,每层都由多个 B+tree 组成。每个 B+tree 的叶子节点除了存储 key 和 value 外,还可能存储指向下一层 B+tree 的指针。
另外 Masstree 中的 B+tree 内部不会 merge 节点,即 remove key 不会引起 key 的重排。这也是为了避免读路径加锁。
Masstree 同样使用了 lazy expansion,即只在必要的时候创建新的 B+tree。比如一个 key “01234567AB”,长度已经超过了 8 字节,但只要没有其它 key 和它共享前缀 “01234567”,我们就没必须为了它单独创建一层 B+tree。
Masstree 相比普通的 B+tree 的一个缺点是 range query 开销更大,一个是要重建 key,另一个是要遍历更多的 layer。
Layout
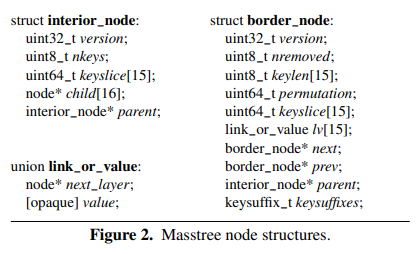
Masstree 中 B+tree 每个节点的 fanout 是 15(精妙的设计),其中所的 border nodes(即 leaf nodes)组成链表以支持 remove 和 getrange。
keyslice 是将长度最多为 8 的 key 编码为一个 uint64(需要保证顺序不变,不足用 0 补齐),这样直接用整数比较代替字符串比较来提升性能。
注意上图中 border node 有 keylen 字段,但 interrior node 就没有了。直接用 keyslice 比较的话必须带上长度,否则无法区分原本就有的 0 和后补上的 0。但 Masstree 保证所有相同 keyslice 的 key 都位于相同的 border node 上,这样 interrior node 上就不需要保存 keylen,直接比较 keyslice 即可,进一步提升了性能。
相同
keyslice最多有 10 个不同的 key(长度 0-8,外加一个长度可能超过 8 的 key),而 B+tree 的 fanout 是 15,因此总是可以保证这些 key 都在相同的 border node 上。
每个 border node 上所有 key 超过 8 字节的部分都保存在 keysuffixes 中。根据情况它既可能是 inline 的,也可能指向另一块内存。合理设定 inline 大小能提升一些性能。(但不多,可能是因为超过 8 字节的 key 并没有那么多)
所有 value 都保存在 link_or_value 中,其中是 value 还是指向下一级 B+tree 的指针是由 keylen 决定的。
Masstree 在访问一个 node 之前会先 prefetch,这就允许 Masstree 使用更宽的 node 来降低树的高度。实践表明当 border node 能放进 4 个 cacheline 大小(256B)时性能最好,此时允许的 fanout 就是 15。
Nonconcurrent modification
insert 可能造成自底向上的分裂,但 remove 不会合并节点,只有当某个节点因此变空的时候,整个节点一起删掉。这个过程也是自底向上的。
所有 border node 之间维护一个双向链表,目的是加速 remove 和 getrange。后者只要求单向链表,但前者的实现依赖双向链表。
Masstree 有个对尾插入的优化:如果一个 key 插入到当前 B+tree 的尾部(border node 没有 next),且当前 border node 已经满了,则它直接插入到新节点中,老节点的数据不移动。
Concurrency overview
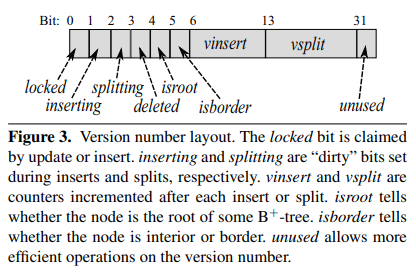
Masstree 中的并发控制本质上是 MVCC + 读路径乐观锁 + 写路径悲观锁:
- 每个节点有一个
version字段,读请求需要在读节点数据的前后分别获取一次version,确保version不变,从而避免脏读。 version本身包含 lock 以及细粒度的状态信息,写路径通过悲观锁来解决冲突。
其中比较困难的是保证 split 和 remove 时读请求仍然能正确地读到数据。
Writer-writer coordination
所有对 node 的修改都需要先对 node 加锁,例外:
parent是由 parent node 的锁保护。prev是由 prev sibling node 的锁保护。
这样可以简化 split 时的状态管理:parent node 可以直接修改 children 的 parent;原有的 node 可以直接修改新 split 出来的 node 的 prev。
split 操作需要同时锁住三个 node:当前 node、parent、next。为了避免死锁,加锁顺序永远是从左向右,从下向上。
这个例子中是先锁 node,再锁 next,再锁 parent。
作者表示曾经对比过不同的并发控制方式,最终决定使用这种细粒度 spinlock 方案。相比之下纯粹使用 CAS 并不会降低 cache 层面的一致性开销。
但使用 Masstree 的应用要自己控制好线程数量,尽量减少 context switch,毕竟使用了 spinlock。
Writer-reader coordination
基本原则:
- 一次写操作开始前会修改
version,结束后再修改一次version。 - 读操作开始前会读一次
version,结束后再读一次version,如果两者不等,说明发生了脏读,需要重试。
接下来的优化方向是:针对部分写操作避免修改 version;针对部分读操作避免重试。
Updates
update 操作会修改已有的 value,需要保证这次修改是原子的。这样不会影响到读操作的正确性,因此也就不需要修改 version。但注意的是写请求不能直接删除一个值,需要用 epoch reclamation 等方法 lazy 回收。
Border inserts
当插入一个值到 border node 上时,为了避免重排已有的 key-value,同时确保这次插入本身对读请求原子可见,Masstree 使用了一种非常巧妙的方法。
每个节点的 key 和 value 数组都是 append-only 的,真正的顺序通过 permutation 字段体现。每个 node 的 fanout 是 15,每个元素用 4 位,这样一共是 60 位,再加上 4 位来表示当前有多少个元素,正好可以放进一个 uint64 中。
完整的插入流程:
- 锁住 node
- load
permutation - 计算得到新的
permutation - append 新的 key-value
- 原子写回新的
permutation。直到此时这次插入才对读请求可见。 - 释放锁
这个过程不会出现脏读,因此也不需要修改 version。
version中的vinsert不处理 border inserts
New layers
Masstree 会将 layer 的创建推迟到 border node 上两个 key 冲突(回顾前面的 lazy expansion,如果两个 key 映射到相同的 keyslice 上,就意味着需要创建新的 layer 了)。
因此,创建新 layer 必然意味着某个 border node 的 key 已经存在。针对一个 key 的操作都可以不修改 version。但这里有个特殊情况要处理:我们现在要将它对应的 value 替换为一个新的 B+tree。这就意味着我们要完成两项修改(link_or_value 和 keylen),不可能由一个原子操作完成。
为了不修改 version(会导致对其它 key 的读操作重试),Masstree 这里引入了一个中间状态:首先将 keylen 修改为 UNSTABLE,接下来修改 link_or_value,之后再将 kenlen 修改为正确的值。读请求如果遇到了 UNSTABLE 需要自行重试。
又是一个要尽量避免 context switch 的地方。
Splits
重头戏来了。
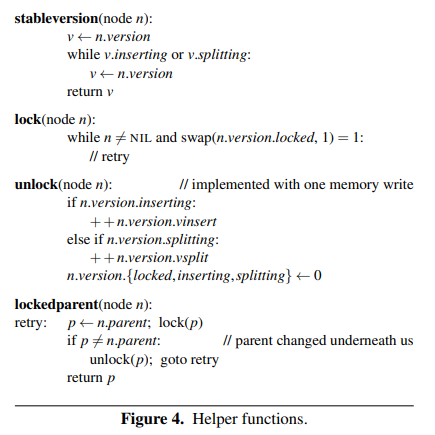
split 是对整个 node 的操作,因此需要修改 version(中的 vsplit),这样读操作就能意识到 split,避免脏读。这里的难点在于,修改是发生在写线程中,但检查是发生在读线程,需要正确处理,否则可能会有些修改生效了但没被读请求察觉。
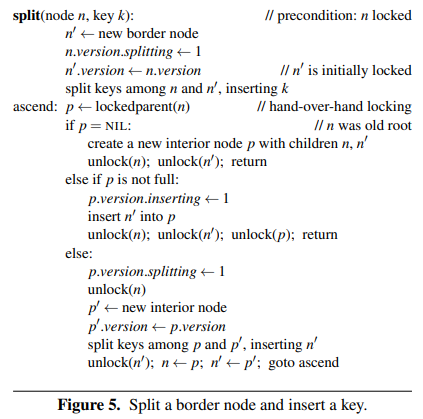
split 过程中会手递手(hand-over-hand)标记和加锁:节点会自底向上标记为 “splitting” 和加锁。同时读请求会自顶向下检查 version。
考虑下面的中间节点 B 分裂出 B’ 的场景:
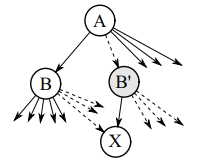
- B 和 B’ 标记为 splitting
- 包括 X 在内的一半子节点从 B 迁移到 B’
- A 被锁住,并标记为 inserting
- 将 B’ 插入 A
- 增加 A 的
vinsert、B 和 B’ 的vsplit,并依次 unlock B,B’,A(按加锁顺序解锁)
为什么不能按加锁的逆序解锁?似乎也没什么问题
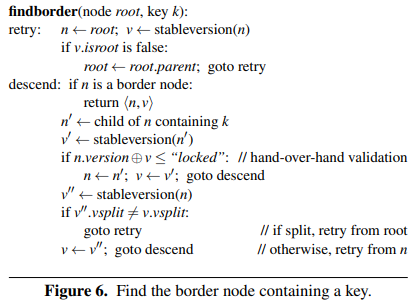
接下来作者探讨了 findborder 是如何与 split 配合保证正确性的。其核心思想就是与 hand-over-hand locking 相对应,findborder 中也要 hand-over-hand validate。对中间节点 A,要先获取 B/B’(取决于 findborder 的调用时机)的 version,再 double check A 并未处于 locked 状态,且这期间 A 并未发生分裂。因为是先获取 B/B’ 的 version,且通过 stableversion 我们知道这个时候 B/B’ 一定未处于 inserting 或 splitting 状态,因此此时要么 B/B’ 在一次 split 开始前,那我们就可以继续往下走;要么在我们获取之后 B/B’ 开始了一次 split,那接下来下一轮迭代时我们检查 B/B’ 的 version 就会 fail。
注意 Masstree 中 insert 总是原地重试,而 split 则会从 root 开始重试。一个因素是并发 split 比并发 insert 更为罕见(fanout 为 15,因此 insert 频率是 split 的 15 倍),因此可以用开销大一些的实现方式。
另一方面,insert 本身也要比 split 轻量很多,后者需要自底向上改变树的结构。
Border node 的 split 主要靠 border nodes 之间的链表来处理,有以下不变量:
- 每个 B+tree 初始只有一个 border node,这个 border node 永远不会被删除,且永远是最左边的 border node(链表头)。
- 每个 border node 负责的范围是 [lowkey, highkey),其中 lowkey 永远不变,highkey 会在 split 和 delete 时修改。
注意一旦查找到达了某个 border node,就不再需要返回 root 进行重试了:顺着链表一路往下找就行了。
Removes
Remove 需要注意的几点:
- 不会物理删除 key-value,只会修改
permutation。这一步不需要修改version。 - 但下次 insert 重用已标记删除的位置时,需要修改
vinsert以避免脏读。 - border node 变为空时会被整个删除,因此我们需要维护一个双向链表来实现 O(1) 的删除节点操作。
- 中间节点的删除操作也需要 hand-over-hand locking。
- 一个 B+tree 为空时可以删除整个树,但需要确保同时锁上自身和上层指向它的 border node。
- 所有删除操作都需要在 epoch reclamation 的保护下进行。
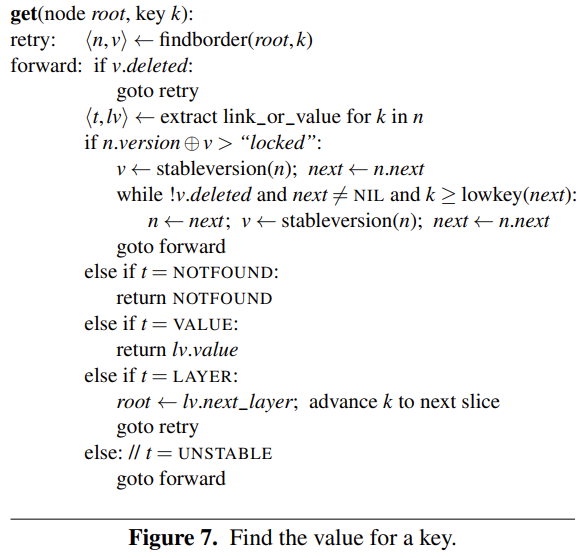
Values
Masstree 中需要保证 value 具有原子修改能力。因此大多数情况下 Masstree 中的 value 都会指向一块单独分配的内存,修改时通过 copy-on-write,再替换这个指针。
当然对于直接支持 atomic 的 value 就可以原地修改了。
Discussion
Masstree 中 lookup 的 30% 的开销来自 node 内部的 key lookup。Masstree 现在是用线性查找,相比二分查找,它的时间复杂度会略高一些,但局部性更好。Masstree 的测试显示在 Intel 处理器上线性查找会快 5% 左右。
另一个潜在优化是类似于 PLAM 的并行查找,通过重叠内存的 prefetch 来掩盖访问内存的延时,测试显示在 Intel 处理器上会提升多达 34% 的吞吐(但在 AMD 机器上没有什么效果)。